Forfattere
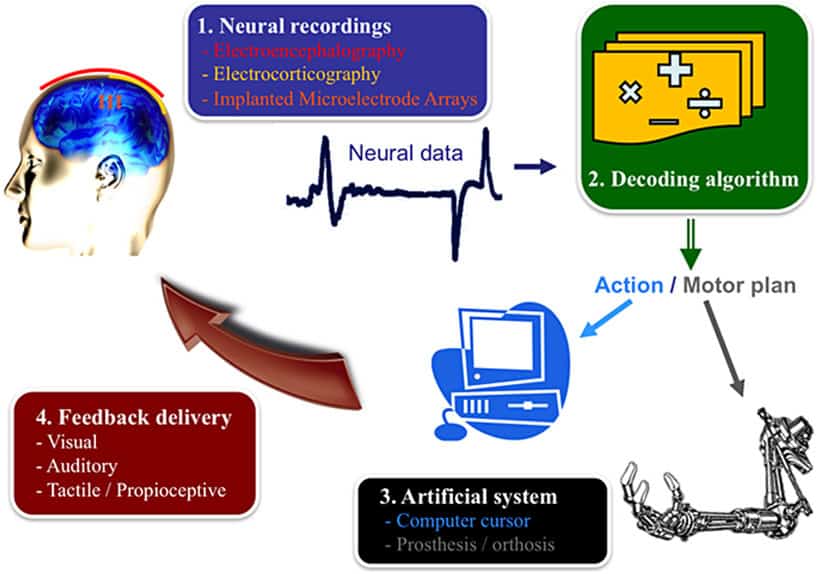
Hjerne-maskine-grænseflader (BMI), eller hjerne-computer-grænseflader, er et spændende tværfagligt område, som er vokset enormt i løbet af det sidste årti. Kort sagt handler BMI om at omdanne tanke til handling og følelse til opfattelse. I et BMI-system føres neurale signaler, der er optaget fra hjernen, ind i en afkodningsalgoritme, der oversætter disse signaler til motorisk output. Dette omfatter styring af en computermarkør, styring af en kørestol eller kørsel af en robotarm. En lukket kontrolsløjfe etableres typisk ved at give forsøgspersonen visuel feedback på protesen. BMI’er har et enormt potentiale til i høj grad at forbedre livskvaliteten for millioner af mennesker, der lider af rygmarvsskade, slagtilfælde, amyotrofisk lateral sklerose og andre alvorligt invaliderende tilstande [1].
Et vigtigt aspekt af et BMI er evnen til at skelne mellem forskellige mønstre af hjerneaktivitet, som hver især er forbundet med en bestemt hensigt eller mental opgave. Derfor er tilpasning en nøglekomponent i et BMI, fordi brugerne på den ene side skal lære at kontrollere deres neurale aktivitet for at generere forskellige hjernemønstre, mens maskinlæringsteknikker (matematiske måder at vælge mønstre ud af komplekse data) på den anden side bør opdage de individuelle hjernemønstre, der kendetegner de mentale opgaver, som brugeren udfører. I bund og grund er et BMI et system med to indlærere.
Hjerne-maskine-grænseflader findes på både invasive og ikke-invasive niveauer. Invasive teknikker kræver hjernekirurgi for at placere registreringselektroder direkte på eller i hjernen. Eksempler på førstnævnte er BMI’er, der bruger intrakortikale multielektrode-arrays implanteret i hjernen, og elektrokortikografi (ECoG)-optagelser direkte fra hjernens blottede overflade. Ikke-invasive teknikker omfatter elektroencefalografi (EEG)-optagelser fra hovedbunden – dvs. uden for kraniet (figur 1, boks 1). EEG- og EKoG-teknikker måler spændingsudsving som følge af strøm, der flyder i hjernens neuroner. På bekostning af at være invasive har EKoG-signaler bedre rumlig opløsning (millimeter!) og signal-støj-egenskaber (større klart signal) end EEG-signaler, og intrakortikale multielektrode-arrays er de mest invasive af de tre teknikker. Disse elektroder registrerer to forskellige typer signaler: udladningen af individuelle neuroner (dvs. spikes), kendt som single-unit-aktivitet (SUA), og den summerede synaptiske strøm, der flyder over det lokale ekstracellulære rum omkring en implanteret elektrode, kendt som det lokale feltpotentiale (LFP).
Forskere, der arbejder med EEG-signaler, har gjort det muligt for mennesker med svære motoriske handicap at styre en række forskellige apparater mentalt, fra tastaturer til kørestole (figur 2). Nogle få svært handicappede bruger i dag regelmæssigt en EEG-baseret BMI til kommunikationsformål. De vigtigste begrænsninger ved EEG-signaler er det omfattende behov for maskinlæringsteknikker og behovet for at kombinere BCI-systemer (brain-computer interface) med smart interaktion design og udstyr. Undersøgelser, der bruger ECoG-signaler, har vist et lovende bevis på konceptet for motorisk neuroprostetik og for rekonstruktion af tale fra menneskets auditive cortex – et grundlæggende skridt mod at give folk mulighed for at tale igen ved at afkode forestillet tale.

På den intrakortikale optagelsesfront (dvs. ved hjælp af elektrodearrays til at registrere aktiviteten af enkelte neuroner) har de seneste fremskridt givet et “proof of concept”, der viser den teoretiske mulighed for at opbygge funktionelle BMI-systemer i den virkelige verden. Faktisk har det sidste årti budt på imponerende demonstrationer af neural kontrol af proteser hos gnavere, ikke-menneskelige primater og mennesker, der deltager i kliniske fase I-forsøg. Disse fremskridt vil accelerere kraftigt i løbet af de næste 5-10 år og forventes at føre til en lang række klinisk anvendelige løsninger til forskellige neurologiske tilstande.
Disse tilgange giver komplementære fordele, og en kombination af teknologier kan være nødvendig for at nå det ultimative mål om at genvinde motorisk funktion med BMI på et niveau, der gør det muligt for en patient ubesværet at udføre opgaver i dagligdagen [4]. Desuden bliver vi nødt til at kombinere praktiske BMI-værktøjer med smarte interaktionsdesigns og -enheder for at lette brugen over lange perioder og reducere den kognitive belastning [5]. BMI’s retning er således vendt fra “Kan et sådant system nogensinde bygges?” til “Hvordan bygger vi pålidelige, nøjagtige og robuste BMI-systemer, der er klinisk levedygtige?” Dette spørgsmål vil kræve, at man tager fat på følgende centrale udfordringer:
Den første er at designe fysiske grænseflader, der kan fungere permanent og vare hele livet. Ny hardware spænder fra tørre EEG-elektroder til biokompatible og fuldt implanterbare neurale grænseflader, herunder EKoG, LFP og SUA, fra flere hjerneområder. En væsentlig komponent i dem alle er trådløs transmission og ultra lavt strømforbrug. Det er vigtigt, at denne nye hardware kræver nye softwareløsninger. Kontinuerlig brug af et BMI skaber pr. definition plastiske ændringer i hjernens kredsløb. Det fører til ændringer i mønstrene i neurale signaler, der koder for brugerens intentioner. BMI’et og især afkodningsalgoritmen skal udvikles, efter at de er taget i brug. Maskinlæringsteknikker, som er avancerede matematiske måder at afkode signaler fra hjernen på, skal spore disse forandringer på en gennemsigtig måde, mens brugeren betjener den hjernestyrede enhed. Denne gensidige tilpasning mellem brugeren og BMI’en er ikke triviel.
Den anden udfordring er at afkode og integrere information om brugerens kognitive tilstand i systemet, som er afgørende for viljestyret interaktion. Det kan omfatte opmærksomhed på fejl begået af enheden, foregribelse af kritiske beslutningspunkter, svigtende opmærksomhed og træthed. Dette vil være afgørende for at reducere den kognitive arbejdsbyrde og lette den langsigtede drift. Kognitiv information skal kombineres med udlæsninger af forskellige aspekter af frivillig motorisk adfærd, fra kontinuerlige bevægelser til diskrete intentioner (f.eks. typer af greb; begyndelse af bevægelser), for at opnå naturlig, ubesværet betjening af komplekse proteser.
Den tredje store udfordring er at give realistisk sensorisk feedback, der formidler kunstig taktil og proprioceptiv information, dvs. bevidstheden om protesens position og bevægelse. Denne type sanseinformation har potentiale til at forbedre styringen af protesen betydeligt ved at give brugeren mulighed for at føle omgivelserne i tilfælde, hvor de naturlige sanseaffektorer er kompromitteret, enten gennem andre sanser eller ved at stimulere kroppen til at genvinde den tabte følelse. Mens den nuværende indsats mest er fokuseret på bred elektrisk stimulering af neuroner i sensoriske områder af hjernen, vil nye optogenetiske tilgange (dvs. at tænde og slukke hjerneceller med lys) give mulighed for mere selektiv stimulering af målrettede neuroner. På et mere perifert niveau er alternativerne elektrisk stimulering af perifere nerver og vibrotaktil stimulering i kropsområder, hvor patienterne stadig har en somatosensorisk opfattelse.
Endelig har BMI-teknologien et stort potentiale som et værktøj til neurovidenskabelig forskning, da den giver forskere en unik mulighed for direkte at kontrollere årsagssammenhængen mellem hjerneaktivitet, sensorisk input og adfærdsmæssigt output [6]. Derfor kan denne teknologi give ny indsigt i handlingens og opfattelsens neurobiologi.
[1] Nicolelis, M. A. 2001. Handlinger ud fra tanker. Nature 409:403-7. doi:10.1038/35053191
[2] Héliot, R., og Carmena, J. M. 2010. Grænseflader mellem hjerne og maskine. I Encyclopedia of Behavioral Neuroscience, red. G. F. Koob, M. Le Moal og R. F. Thompson, 221-5. Oxford: Academic Press.
[3] 3. Carlson, T. E., og Millán, J. d. R. 2013. Hjernekontrollerede kørestole: en robotarkitektur. IEEE Robot. Automot. Mag. 20:65–73. doi:10.1109/MRA.2012.2229936
[4] Millán, J. d. R., og Carmena, J. M. 2010. Invasiv eller ikke-invasiv: forståelse af hjerne-maskine-interfaceteknologi. IEEE Eng. Med. Biol. Mag. 29:16–22. doi:10.1109/MEMB.2009.935475
[5] Millán, J. d. R., Rupp, R., Müller-Putz, G. R., Murray-Smith, R., Giugliemma, C., Tangermann, M. et al. 2010. Kombination af hjerne-computer-grænseflader og hjælpeteknologier: state-of-the-art og udfordringer. Front. Neurosci. 4:161. doi:10.3389/fnins.2010.00161
[6] 6. Carmena, J. M. 2013. Fremskridt inden for neuroprostetisk læring og kontrol. PLoS Biol. 11:e1001561. doi:10.1371/journal.pbio.1001561

Forbrændinger er almindelige skader, der opstår, når varme, varme væsker, kemikalier, elektricitet eller endda solen beskadiger huden. Nogle forbrændinger er milde, som f.eks. solskoldning, mens andre kan være så alvorlige, at de beskadiger muskler, knogler eller endda organer. Mens de fleste forbrændinger er smertefulde, kan de mest alvorlige faktisk være smertefri, fordi de ødelægger nerverne. Forbrændinger svækker også hudens naturlige barriere, hvilket øger risikoen for infektion. Kroppen heler forbrændinger i tre faser, men dybere forbrændinger tager længere tid at komme sig over og kan efterlade permanente ar. Behandlingen afhænger af sværhedsgraden – nogle forbrændinger kan køles med vand, mens andre kræver akut lægehjælp. Denne artikel undersøger, hvad der forårsager forbrændinger, hvordan de klassificeres, og hvordan de heler, hvilket hjælper børn og deres omsorgspersoner med at forstå, hvordan man forebygger, håndterer og kommer sig efter disse skader.
…
Forestil dig dine knogler som fundamentet i et hus – de holder ikke kun din krop oprejst, men beskytter også dine organer og hjælper endda med at producere blodceller. Knogler består af en kombination af kollagen, som giver dem fleksibilitet, og mineraler som calcium, som giver dem styrke, og de spiller en afgørende rolle i kroppen. Vidste du, at dine tænder også er afhængige af stærke knogler? Alveolærknoglen, som støtter dine tænder, skal forblive sund for at sikre, at dit smil forbliver stabilt. Inde i knoglerne findes der specielle celler: osteoblaster opbygger ny knogle, mens osteoklaster “nedbryder” den gamle knogle. Når disse celler er ude af balance, kan der opstå knogletab omkring tænderne, som det ses ved parodontitis, en almindelig mundsygdom hos voksne. For at forebygge parodontitis er det afgørende at opretholde god mundhygiejne, en sund kost og en afbalanceret livsstil. Disse ting øger chancerne for, at dine knogler og tænder forbliver stærke og beskyttede gennem hele dit liv.
…
Bæredygtigt udviklingsmål 8: Anstændigt arbejde og økonomisk vækst har til formål at hjælpe mennesker med at få sikre og retfærdige jobs og tjene nok penge til at forsørge deres familier og lokalsamfund. Dette mål handler om at hjælpe virksomheder med at vokse på en bedre måde og behandle arbejdstagere retfærdigt. At skabe et nyt produkt, hæve eller sænke arbejdstagernes lønninger eller ændre måden, hvorpå arbejdet udføres, indebærer risikable beslutninger, som virksomhedsejere skal overveje. I øjeblikket er et stort spørgsmål, om virksomhederne skal holde fast i traditionelle metoder eller investere i smarte robotter og kunstig intelligens, som kan hjælpe dem med at arbejde hurtigere og bedre. Disse valg kan se enkle ud, men de har vigtige konsekvenser: hvor mange mennesker der får arbejde, hvilken slags arbejde de udfører, og endda hvor meget penge de tjener. I denne artikel vil vi undersøge, hvordan teknologi kan forandre den måde, mennesker arbejder på, og hvordan forskere kan bruge matematiske modeller til at få et indblik i, hvordan fremtidens arbejdspladser kan komme til at se ud.
…
Alle føler sig bange nogle gange, men når en frygt bliver så stærk, at den forhindrer os i at gøre ting, vi gerne vil eller skal, og forstyrrer vores dagligdag, kan det betragtes som en fobi. At være bange for skræmmende ting, som højder, havet eller rotter, er godt og vigtigt for overlevelsen, men for meget frygt kan være skadelig og forårsage psykisk eller fysisk lidelse. Fobier udvikles på grund af mange faktorer. En faktor er genetik, hvilket betyder, at fobier kan nedarves i familien. Fobier kan også skyldes miljømæssige påvirkninger, såsom særligt skræmmende oplevelser. Derudover kan fobier opstå på grund af noget, der kaldes frygtkonditionering, hvor hjernen lærer at forbinde noget harmløst med en følelse af fare. Fobier kan endda udvikle sig ved at se en anden være bange for noget ( ). I denne artikel diskuterer vi nogle af de måder, hvorpå en fobi kan udvikle sig, og hvordan de kan behandles.
…